






































 วันที่:2025-06-17
วันที่:2025-06-17
1. หลักการทำงานของเซ็นเซอร์อินฟราเรด
หลังจากรังสีอินฟราเรดจากเป้าหมายและพื้นหลังผ่านเลนส์วัตถุแล้ว จะถูกสร้างขึ้นบนระนาบโฟกัสของส่วนประกอบตรวจจับ ส่วนประกอบตรวจจับอินฟราเรดจะแปลงรังสีอินฟราเรดเป็นสัญญาณไฟฟ้า และส่งผ่านวงจรประมวลผลสัญญาณอินฟราเรด จากนั้นสัญญาณอินฟราเรดจะผ่านกระบวนการ Correlated Double Sample (CDS) การกรองทางอิเล็กทรอนิกส์ การแปลง A/D การประมวลผล NUC การกำจัดข้อบกพร่อง และการจัดเรียงสังเคราะห์ หลังจากนั้น สัญญาณดิจิทัลแบบขนานจะถูกส่งไปยังหน่วยประมวลผลเป้าหมายผ่านสายส่งระยะทางหนึ่งเพื่อประมวลผลต่อไป
2. ส่วนประกอบของเซ็นเซอร์อินฟราเรด
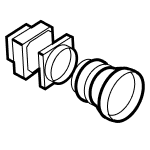
เซ็นเซอร์อินฟราเรดประกอบด้วยเลนส์วัตถุ (ระบบออปติคอลอินฟราเรด), โมดูลตรวจจับอินฟราเรด, วงจรประมวลผลสัญญาณอินฟราเรด, อุปกรณ์ปรับเสถียรภาพรอง และวงจรควบคุมและสื่อสาร ดังแสดงในรูปที่ 5.31

2.1 เลนส์วัตถุ
เลนส์วัตถุของเซ็นเซอร์อินฟราเรดมีความต้องการสูงในด้านคุณภาพของภาพและประสิทธิภาพทางแสง และการออกแบบทางแสงแบบดั้งเดิมไม่สามารถรับประกันประสิทธิภาพทางแสงของเลนส์วัตถุได้ ดังนั้น เลนส์วัตถุจึงควรได้รับการออกแบบให้เป็นระบบส่งผ่านแสงแบบแอสเฟริค โดยใช้วัสดุหลากหลายชนิดเพื่อแก้ไขความคลาดเคลื่อนของสีในช่วงความถี่การทำงาน
2.2 ส่วนประกอบการตรวจจับอินฟราเรด
ส่วนประกอบการตรวจจับอินฟราเรดประกอบด้วยส่วนต่างๆ ดังต่อไปนี้:
(1) ส่วนประกอบ ID TL005 288×4 LWIR IDDCA
(2) วงจรสร้างพัลส์นาฬิกาของตัวตรวจจับ: สร้างสัญญาณพัลส์ที่จำเป็นเพื่อให้แน่ใจว่าตัวตรวจจับทำงานได้อย่างปกติ
(3) วงจรไบแอสของตัวตรวจจับ: สร้างแรงดันไบแอสที่จำเป็นสำหรับการทำงานปกติของตัวตรวจจับ
(4) วงจรสร้างพัลส์เปิดใช้งาน: สัญญาณเปิดใช้งานพัลส์ของวงจรการอ่านค่า CCD ของตัวตรวจจับถูกสร้างขึ้นโดยระบบวัดมุม เมื่อพัลส์เปิดใช้งานมาถึง วงจรสร้างพัลส์นาฬิกาจะสร้างสัญญาณพัลส์ที่ CCD ต้องการ
3. วงจรประมวลผลสัญญาณอินฟราเรดล่วงหน้า

(1) CDS: ใช้กับสัญญาณเอาต์พุตของตัวตรวจจับเพื่อกรองสัญญาณรบกวนจากการสลับที่เกิดจากวงจรการอ่านค่าของตัวตรวจจับ
(2) การกรองทางอิเล็กทรอนิกส์: สามารถกรองสัญญาณรบกวนความถี่ต่ำ ลดสัญญาณรบกวนความถี่สูง และปรับปรุงอัตราส่วนสัญญาณต่อสัญญาณรบกวน
(3) การแปลง A/D: สามารถใช้แปลงสัญญาณอินฟราเรดเป็นปริมาณอนาล็อก/ดิจิทัล โดยมีระดับการควอนไทเซชัน 12 บิต
(4) NUC: สามารถแก้ไขสัญญาณเอาต์พุตของแต่ละช่องสัญญาณจากทั้งหมด 288 ช่องของตัวตรวจจับ เพื่อให้แน่ใจว่าภายใต้การทำงานของพลังงานรังสีอินฟราเรดเดียวกัน ความไม่สม่ำเสมอของสัญญาณที่สร้างขึ้นโดยแต่ละช่องสัญญาณมีค่าน้อยกว่า 0.5% สำหรับตัวตรวจจับที่มีการตอบสนองเชิงเส้น การแก้ไขแบบสองจุดของจุดตอบสนองและจุดไบแอสก็เพียงพอแล้ว สำหรับตัวตรวจจับที่มีการตอบสนองแบบไม่เชิงเส้น จำเป็นต้องใช้อัลกอริทึมการประมาณค่าเชิงเส้นแบบหลายจุดเพื่อแก้ไข เนื่องจากระบบอินฟราเรดบางประเภทจำเป็นต้องครอบคลุม 360° จึงไม่สามารถรวมการอ้างอิงอุณหภูมิเข้ากับระบบได้ จากการวิจัยเกี่ยวกับการประมาณเชิงเส้นแบบแบ่งส่วนสองจุดและหลายจุด และการชดเชยความไม่สม่ำเสมอตามฉาก สภาพการทำงานจึงเหมาะสม จากนั้นจึงพัฒนาฮาร์ดแวร์ทั่วไปที่สามารถดำเนินการอัลกอริทึมทั้งสามนี้ได้
(5) การกำจัดข้อบกพร่อง: แทนที่ด้วยค่าเฉลี่ยสัญญาณของสองช่องสัญญาณที่ไม่มีข้อบกพร่องในบริเวณใกล้เคียงกับข้อบกพร่อง เพื่อให้สามารถกำจัดข้อบกพร่องได้
(6) การรวมและการจัดเรียง: สัญญาณในคอลัมน์ก่อนหน้าจะถูกหน่วงเวลา ซึ่งเทียบเท่ากับเวลาที่อยู่ระหว่างสองคอลัมน์ที่อยู่ติดกัน หลังจากประมวลผลแบบผสมของสองคอลัมน์แล้ว จะได้คอลัมน์ของสัญญาณเพื่อทำการรวมและการจัดเรียงให้เสร็จสมบูรณ์
(7) อินเทอร์เฟซแบบขนาน: คือการส่งสัญญาณอินฟราเรดดิจิทัล สัญญาณการซิงโครไนซ์พิกเซล และสัญญาณการซิงโครไนซ์คอลัมน์ไปยังหน่วยประมวลผลเป้าหมายที่เป็นไปได้แบบขนาน และรับสัญญาณการซิงโครไนซ์คอลัมน์จากหน่วยโกนิโอมิเตอร์พร้อมกัน
4. วงจรควบคุมและสื่อสาร
หน้าที่การทำงาน:
(1) รับสัญญาณควบคุม (รวมถึงสัญญาณควบคุมการแก้ไขความสม่ำเสมอ สัญญาณควบคุมการตรวจสอบตัวเอง และสัญญาณควบคุมอัตราขยาย) จากหน่วยประมวลผลเป้าหมาย และส่งสัญญาณผลการตรวจสอบตัวเองไปยังหน่วยประมวลผลเป้าหมาย
(2) รับสัญญาณทิศทางของแพลตฟอร์มจากระบบเซอร์โวของแพลตฟอร์มที่เสถียร
(3) ควบคุมอุปกรณ์รักษาเสถียรภาพรอง
(4) ควบคุมวงจรประมวลผลสัญญาณอินฟราเรดล่วงหน้า
5. อุปกรณ์ช่วยทรงตัวรอง
อุปกรณ์ปรับเสถียรภาพรองประกอบด้วยกระจก ไจโรสโคป มอเตอร์เซอร์โว และวงจรขับเคลื่อน หน้าที่ของอุปกรณ์นี้คือการปรับเสถียรภาพแกนแสงอินฟราเรดอย่างแม่นยำในขั้นตอนที่สอง
