




































 วันที่:2025-06-12
วันที่:2025-06-12
หลักการทำงานของระบบซูม
เลนส์ซูมต่อเนื่องทำงานบนหลักการที่ว่าระยะโฟกัสของระบบเลนส์สามารถเปลี่ยนแปลงได้อย่างต่อเนื่องภายในช่วงที่กำหนด และตำแหน่งระนาบภาพจะคงที่ในระหว่างการปรับระยะโฟกัส เมื่อไม่สามารถเปลี่ยนกำลังโฟกัสของระบบเลนส์ได้โดยตรง การเปลี่ยนแปลงระยะโฟกัสจึงทำได้โดยการปรับระยะห่างระหว่างกลุ่มเลนส์แต่ละกลุ่ม ซึ่งเป็นหลักการพื้นฐานของระบบเลนส์ซูม
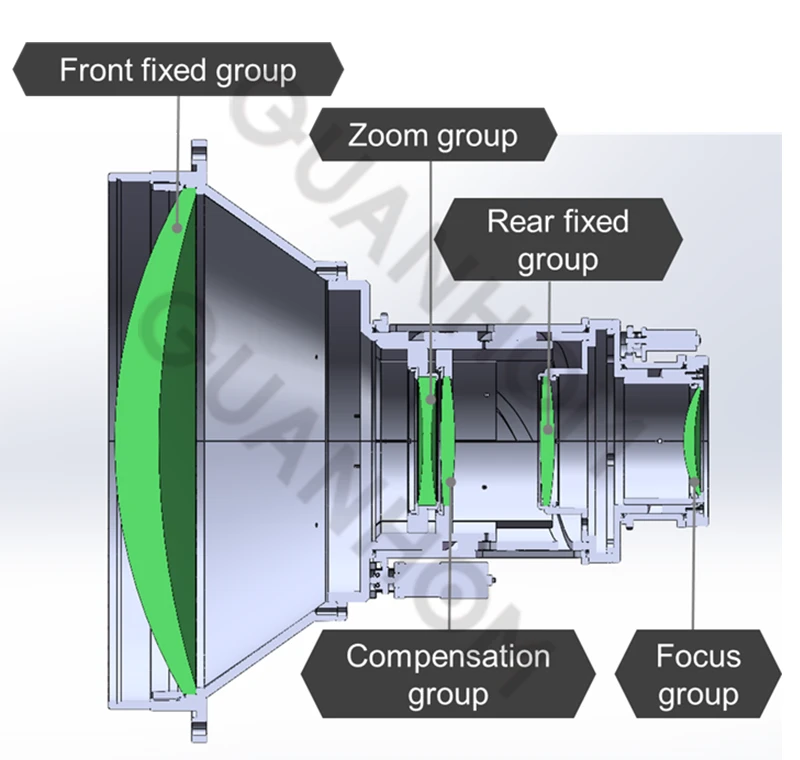
ดังนั้น ในระบบเลนส์ซูม ระยะโฟกัสของกลุ่มเลนส์หลายกลุ่มและระยะห่างระหว่างกลุ่มเลนส์เหล่านั้นจะร่วมกันกำหนดระยะโฟกัสของระบบ ดังแสดงในรูปด้านล่าง โดยทั่วไปแล้ว ระบบเลนส์ซูมประกอบด้วยส่วนประกอบห้าส่วน ได้แก่ กลุ่มเลนส์คงที่ด้านหน้า กลุ่มเลนส์ซูม กลุ่มเลนส์ชดเชย กลุ่มเลนส์คงที่ด้านหลัง และกลุ่มเลนส์ปรับโฟกัส ดังนั้น ระยะโฟกัสของส่วนประกอบหลายชิ้นในระบบเลนส์ซูมและระยะห่างระหว่างแต่ละส่วนประกอบจะร่วมกันกำหนดระยะโฟกัสของระบบ เมื่อปรับระยะโฟกัส กลุ่มเลนส์ซูมและกลุ่มเลนส์ชดเชยจะเคลื่อนที่ไปในทิศทางที่สอดคล้องกันตามพารามิเตอร์การออกแบบทางแสง เพื่อเปลี่ยนระยะห่างระหว่างเลนส์เพื่อให้ได้การเปลี่ยนแปลงระยะโฟกัส

ยกตัวอย่างเช่น GCZ103013D: ค่า F อยู่ที่ 0.85-1.3 ระยะโฟกัสอยู่ที่ 30-300 มม. นี่คือระบบส่งผ่านแสงที่ประกอบด้วยกลุ่มเลนส์ห้ากลุ่ม ได้แก่ กลุ่มเลนส์คงที่ด้านหน้า กลุ่มเลนส์ซูม กลุ่มเลนส์ชดเชย กลุ่มเลนส์คงที่ด้านหลัง และกลุ่มเลนส์โฟกัส กลุ่มเลนส์ซูมเคลื่อนที่แบบเส้นตรง ในขณะที่กลุ่มเลนส์ชดเชยเคลื่อนที่แบบไม่เป็นเส้นตรงเล็กน้อย เพื่อรักษาระดับความคมชัดของภาพตลอดกระบวนการซูม กลุ่มเลนส์โฟกัสเคลื่อนที่แบบเส้นตรงเพื่อปรับโฟกัสตามการเบลอภาพที่เกิดจากการเปลี่ยนแปลงของอุณหภูมิ
(I) การคำนวณเส้นโค้งแคมสำหรับระบบ
หลังจากกำหนดพารามิเตอร์โครงสร้างทางแสง (รัศมี ระยะห่าง วัสดุ) ของกลุ่มเลนส์แต่ละกลุ่มแล้ว จำเป็นต้องคำนวณการเคลื่อนที่ของกลุ่มเลนส์ซูมและกลุ่มเลนส์ชดเชยด้วย เพื่อดำเนินการสร้างรางลูกเบี้ยวต่อไป
ตามหลักการของเลนส์เกาส์เซียน ให้ระยะการเคลื่อนที่ของกลุ่มเลนส์ซูมเป็น x เพื่อให้ระนาบภาพคงที่ การเคลื่อนที่ y ของกลุ่มเลนส์ชดเชยสามารถคำนวณได้ดังนี้:

ในสูตร: ds23 คือช่วงห่างระหว่างกลุ่มซูมและกลุ่มชดเชยที่ทางยาวโฟกัสสั้น; f2' คือทางยาวโฟกัสของกลุ่มซูม; f3' คือทางยาวโฟกัสของกลุ่มชดเชย; l2' คือระยะภาพของกลุ่มซูม; l3' คือระยะภาพของกลุ่มชดเชย ตัดตัวแปรระยะวัตถุของกลุ่มซูม l2* ออกจากสองสูตรข้างต้น สูตรที่ง่ายขึ้นมีดังนี้:

ในสูตร:

สารละลาย:

ค่าการชดเชย y จะใช้รากที่มีค่าสัมบูรณ์น้อยที่สุด หากไม่มีรากที่แท้จริงของ y ในระหว่างการเคลื่อนที่ของกลุ่มซูม แสดงว่าเส้นโค้งขาดตอน ทำให้ไม่สามารถซูมได้อย่างต่อเนื่อง ในกรณีนี้ ระบบออปติคอลจำเป็นต้องคำนวณใหม่ ปรับแต่ง หรือเพิ่มประสิทธิภาพ ฯลฯ
จากสูตรการแก้ปัญหาข้างต้น เส้นโค้งลูกเบี้ยวของระบบซูมแสดงอยู่ในรูป จะเห็นได้ว่าระยะชักสูงสุดของกลุ่มซูมคือ 54 มม. และระยะชักสูงสุดของกลุ่มชดเชยคือ 27.5 มม. เส้นโค้งของกลุ่มชดเชยเปลี่ยนแปลงอย่างราบรื่น และสามารถใช้เส้นโค้งทั้งสองกลุ่มนี้ในการประมวลผลการติดตามลูกเบี้ยวได้
(II) การออกแบบกลไกซูม
แคมซูมหมุนได้อย่างราบรื่นโดยไม่มีช่องว่างภายใต้การทำงานของลูกบอลและแหวนยึดแคม ช่วยลดแรงบิดเอาต์พุตของมอเตอร์ได้อย่างมีประสิทธิภาพโดยการเปลี่ยนแรงเสียดทานแบบเลื่อนเป็นแรงเสียดทานแบบกลิ้ง เมื่อมอเตอร์ขับเคลื่อนแคมให้หมุน แคมจะส่งการเคลื่อนที่ไปยังสไลด์ซูมและสไลด์ชดเชยผ่านหมุดนำทาง ภายใต้การนำทางของร่องตรงบนท่อเลนส์หลัก สไลด์ซูมและสไลด์ชดเชยจะแปลงการเคลื่อนที่แบบหมุนของแคมเป็นการเคลื่อนที่ขนานของสไลด์ไปตามทิศทางแกนแสง จึงทำให้เกิดการซูม ร่องโค้งซูมและร่องโค้งชดเชยบนแคมได้รับการประมวลผลอย่างแม่นยำเพื่อให้แน่ใจว่าการเคลื่อนที่ซูมและการชดเชยสอดคล้องกันแบบจุดต่อจุด รักษาความคมชัดตลอดการซูมอย่างต่อเนื่อง
เนื่องจากระบบต้องการให้ความสม่ำเสมอของแกนแสงน้อยกว่า A ในระหว่างกระบวนการซูม ความยาวที่เหมาะสมของตัวเลื่อนซูม ตัวเลื่อนชดเชย และท่อเลนส์หลักจึงเป็น L มม. และช่องว่างระหว่างตัวเลื่อนกับท่อควรน้อยกว่า h = L × tan(A) ดังนั้น ตัวเลื่อนซูมและตัวเลื่อนชดเชยจึงต้องเข้ากันกับท่อเลนส์หลัก และช่องว่างจะถูกควบคุมให้อยู่ในช่วง h เพื่อให้มั่นใจได้ว่าการเคลื่อนที่ของตัวเลื่อนซูมและตัวเลื่อนชดเชยเป็นไปอย่างราบรื่นในขณะที่ยังคงเป็นไปตามข้อกำหนดของความเสถียรของแกนแสง
(III) การวิเคราะห์องค์ประกอบจำกัดของลูกเบี้ยว
ตามข้อกำหนดด้านความสามารถในการปรับตัวเข้ากับสภาพแวดล้อม เลนส์ต้องทนต่อแรงกระแทกสูงสุด 10g เพื่อให้แน่ใจว่าการเสียรูปของสไลด์และลูกเบี้ยวจะยังคงอยู่ในช่วงความคลาดเคลื่อนที่ยอมรับได้ทางแสง เพื่อให้เป็นไปตามข้อกำหนดด้านประสิทธิภาพ สไลด์ซูม สไลด์ชดเชย และลูกเบี้ยวทำจากอะลูมิเนียมแข็งพิเศษ 7A09 ซึ่งมีอัตราส่วนปัวซอง 0.33 โมดูลัสยืดหยุ่น 73 GPa ความแข็งแรงคราก ≥400 MPa และความหนาแน่น 2.78 × 10⁻⁶ กก./มม.³ ชุดซูมมีน้ำหนัก 0.4 กก. ชุดชดเชยมีน้ำหนัก 0.4 กก. และลูกเบี้ยวมีน้ำหนัก 0.5 กก.
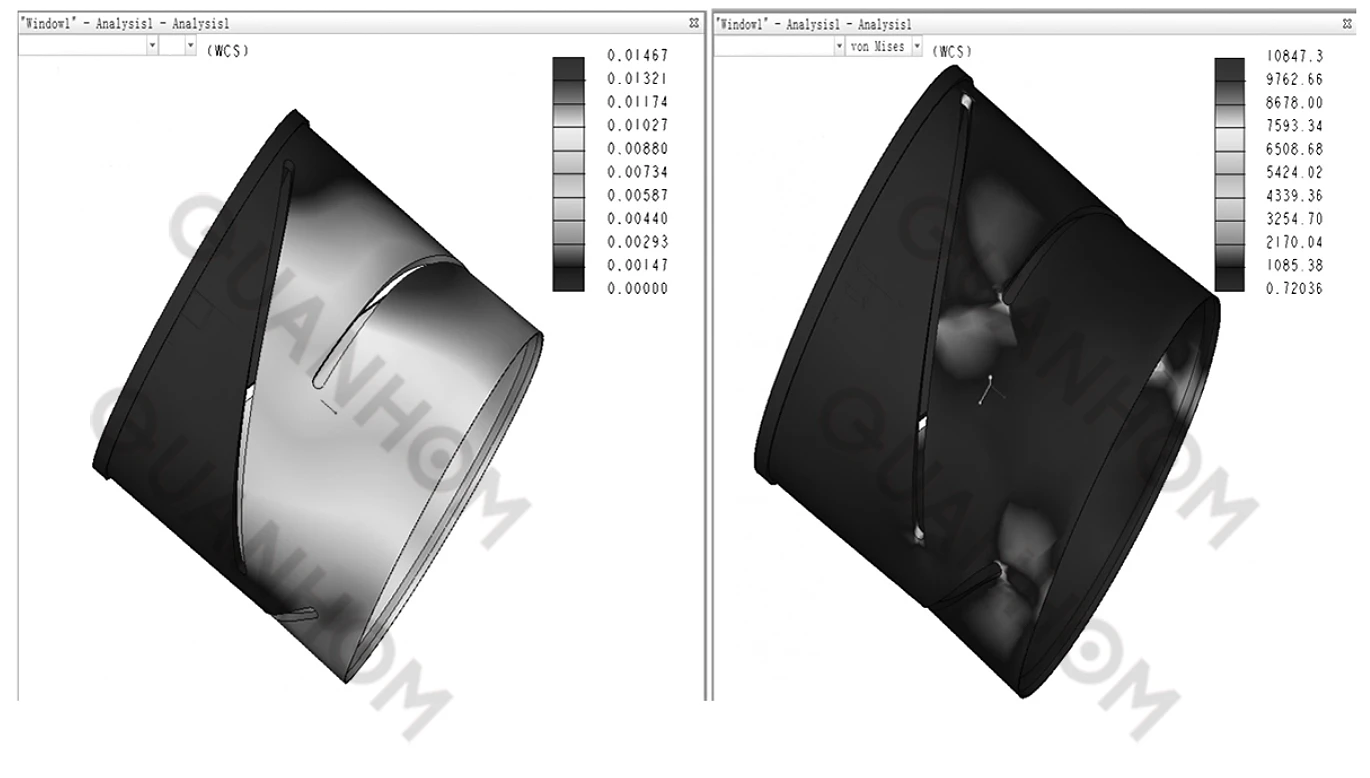
จากลักษณะโครงสร้าง ลูกเบี้ยวจะรับแรงตามแนวแกนสูงสุดผ่านหมุดนำทางในระหว่างการกระแทก สำหรับแรงตามแนวแกนของลูกเบี้ยว ร่องโค้งแต่ละร่องของลูกเบี้ยวจะรับแรงตามแนวแกน 10×0.4/2 กก. = 20 นิวตัน และปลายรองรับตามแนวแกนของลูกเบี้ยวจะรับแรงปฏิกิริยา 10×(0.4+0.4+0.5) กก. = 130 นิวตัน มีการกำหนดการเคลื่อนที่คงที่ที่ปลายรองรับของลูกเบี้ยวสำหรับการวิเคราะห์แบบสถิต ผลการวิเคราะห์แสดงในรูปด้านล่าง การเสียรูปสูงสุดคือ 0.01467 มม. ซึ่งอยู่ในช่วงการเสียรูปที่ยอมรับได้ทางแสง ความเค้นสูงสุดคือ 10.85 MPa ซึ่งน้อยกว่าความแข็งแรงคราก 400 MPa ดังนั้นความแข็งแรงของลูกเบี้ยวจึงเป็นไปตามข้อกำหนด
(IV) การวิเคราะห์องค์ประกอบจำกัดของสไลด์
เนื่องจากลักษณะโครงสร้าง สไลด์ซูมและสไลด์ชดเชยจะเกิดการเสียรูปสูงสุดภายใต้แรงรัศมี โดยมีแรงสูงสุด 10 × 0.4 กก. = 40 นิวตัน มีการกำหนดการเคลื่อนที่คงที่ให้กับเส้นผ่านศูนย์กลางภายในของสไลด์สำหรับการวิเคราะห์แบบสถิต ผลการวิเคราะห์แสดงในรูปด้านล่าง การเสียรูปสูงสุดของสไลด์ซูมคือ 0.00683 มม. และความเค้นสูงสุดคือ 3.2 MPa ในขณะที่การเสียรูปสูงสุดของสไลด์ชดเชยคือ 0.00135 มม. และความเค้นสูงสุดคือ 1.47 MPa ได้นำการเสียรูปเหล่านี้ไปจำลองในซอฟต์แวร์ทางแสง และพบว่าแทบไม่มีผลกระทบต่อการถ่ายภาพ ดังนั้น ความแข็งแรงของสไลด์ซูมและสไลด์ชดเชยจึงเป็นไปตามข้อกำหนด
(V) การตรวจสอบความแข็งแรงของหมุดนำทางซูม
แต่ละชุดซูมและชุดชดเชยมีน้ำหนัก 0.4 กก. และแรงกระแทกสูงสุดคือ 40 นิวตัน ภายใต้แรงกระแทก 10 กรัม แต่ละหมุดนำทางรับแรงเฉือนสูงสุด 20 นิวตัน พื้นที่หน้าตัดขั้นต่ำของหมุดนำทางคือ 4.52 × 10⁻⁴ ตร.ม. และทำจากทองเหลือง HPb59-1 และความเค้นเฉือนที่ยอมรับได้คือ 200 เมกะปาสคาล
ความเค้นเฉือนสูงสุดบนหมุดนำทางคือ: T = 20/(4.52 × 10⁻⁴), Pa = 4.42 × 10⁴ Pa < 200 เมกะปาสคาล ดังนั้นความแข็งแรงของหมุดจึงเป็นไปตามข้อกำหนด

เอกสารอ้างอิง:
[1] TANG Han, ZHOU Chunfen, FENG Jianwei, ZHANG Wei และคณะ การออกแบบระบบออปติคอลซูมต่อเนื่อง LWIR พร้อมไดอะแฟรมแบบปรับได้ [J] เทคโนโลยีอินฟราเรด, 2024, 46(5): 491-500
[2] CHEN Peng การออกแบบโครงสร้างของเลนส์ซูมต่อเนื่อง LWIR แบบไม่ใช้ระบบระบายความร้อน [A] กระบวนการและอุปกรณ์, 2019, 206-207
